Expanding Square

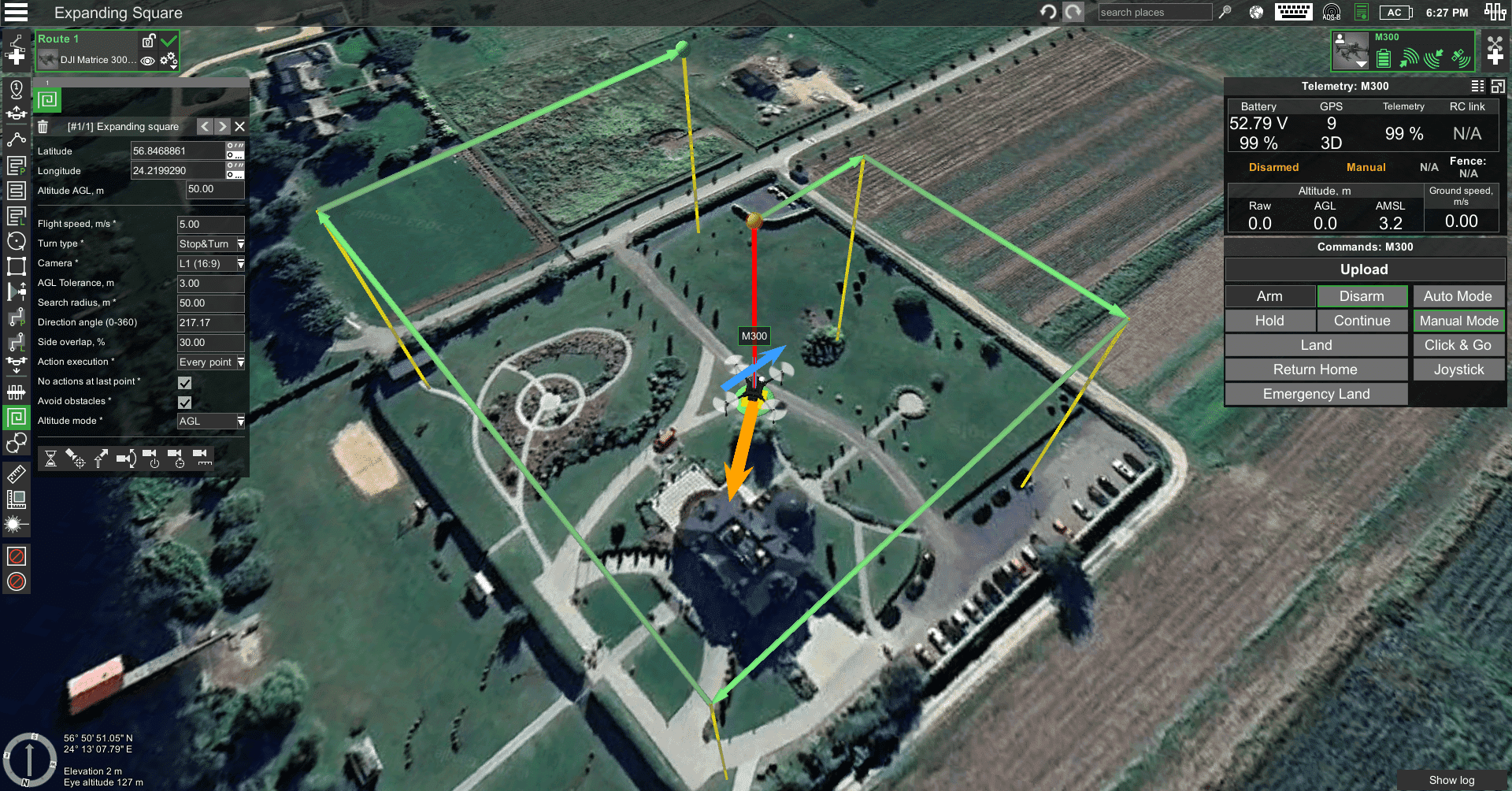
Expanding square flight plan
Expanding square tool creates an area for search based on the search radius, selected camera's profile, and flight height (AGL). A rectangle spiral-like flight trajectory that covers the specified area around the location will be calculated, having no gaps in the camera’s footprint.
Search spacing derives from the selected camera's horizontal FOV and the flight height. (see parameters of the camera).
NOTE: Distance from location to the outer segment may exceed the search radius to ensure that the search area is completely covered

Flight speed – flight speed of the drone for a segment.
Turn type – the way vehicle passes segments. Turn type is selected from the list of available turn types for a particular vehicle profile.
Camera – a payload assigned to a vehicle profile. If multiple cameras are assigned to the vehicle, it is possible to select which camera will be used to scan the area.
AGL Tolerance, m – allows flying straight trajectories over the slightly waved landscape, by specifying how precisely the UAV should follow the required altitude above ground. To maintain a defined height additional waypoints will be added if the difference in height is larger than the AGL tolerance. The smaller the AGL tolerance value, the greater number of waypoints will be generated. If AGL tolerance is set to 0 (zero) UAV’s altitude will be constant throughout the route, but a lot of additional waypoints will be added.
Search radius - the radius that should be covered. Distance from a search center to the outer segment that should be covered by the payload's footprint.
Direction angle - to change the direction of the main scanning progress. By default, the algorithm calculates a route in a bounded polygon so that the main course of the scan is performed in the direction of "South-North".
Side overlap (%) – the ratio of the overlap into neighboring frames (located in neighboring rows). Value is set in the range from 1% to 90%.
Parameters for the execution of actions:
• Every point – actions will be added for all waypoints;
• At start – the algorithm will add action only for the first waypoint;
No action at last point – will remove the action of the last waypoint.
Avoid obstacles – a flag to be set if buildings have to be considered when planning the path. Do not uncheck without a specific need to do so.
Updated 10 months ago