Lidar corridor

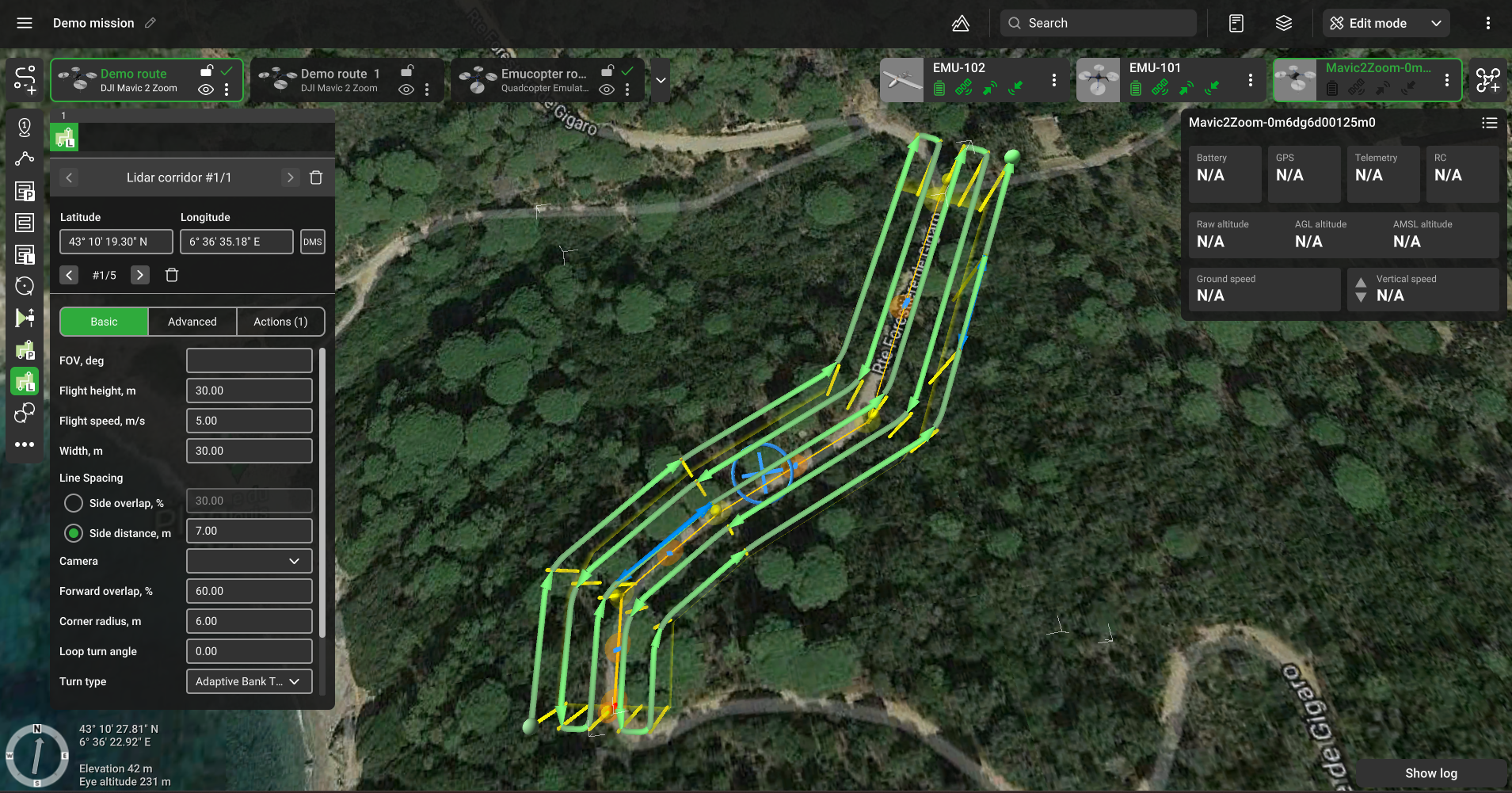
LiDAR corridor flight plan
The UgCS toolset for LIDAR mission planning is enabled for the UgCS EXPERT and ENTERPRISE licenses and supported DJI drones. To use the LIDAR toolset - create a new route for DJI M600, M300, M350, M210/M200, or PX4/Ardu autopilots..
To get accurate LIDAR scan results, a pilot needs to follow the below rules:
• Initialize IMU properly
IMU initialization is typically performed at least two times per flight. Before scanning begins
and after scanning ends. Optionally, the pilot may pause the flight and make additional IMU
initialization to reset accumulated errors. This function is implemented as a drone command
so the pilot may run it at any time. For this command to run, the drone should already be in the
air.
• Maintain correct flight height and line spacing between scans to ensure coverage and point
density
• Ensure the right drone turns and line scanning to minimize IMU error accumulation and
excessive shaking of LIDAR above the area of interest.
LIDAR corridor scanning is helpful for the following: roads, power lines, and pipelines.
Basic

FOV, deg - field f view in degrees. It is the visible extent of the scene captured by the image sensor, stated as an angle.
Flight height – altitude of flight along the area.
Width - allowing to specify the width of the pattern in meters.
Line spacing - there are 2 options. A pilot can specify
- side overlap in percent ;
- side distance in meters.
In the case of percentage, the software will calculate line spacing based on FOV and flight height.
Camera - list of preconfigured profiles of cameras (optional)
Forward overlap - – the ratio of the overlap in neighboring frames. Value is set in the range from 1% to 90%.
Corner radius - radius of adaptive turn.
Loop turn angle - the maximum value below which software will add loops for turns. For values greater than “Loop turn angle,” standard bank turns will be used. Range for the value: (0;180)
Default: 90.
Altitude mode - AMSL, AGL, Smart AGL, or Rangefinder to set Flight height.
IMU Calibration - enable IMU calibration every 100 seconds or 1000 meters. The interval between LiDAR IMU calibration during route execution depends on what is elapsed first.
Advanced

AGL Tolerance - allows flying straight trajectories over the slightly waved landscape, by specifying how precisely the UAV should follow the required altitude above ground. To maintain a specified height additional waypoints will be added if the height difference is larger than the AGL tolerance. The smaller the AGL tolerance value, the greater the number of waypoints will be generated. If AGL tolerance is set to 0 (zero) UAV’s altitude will be constant throughout the route, but many additional waypoints will be added.
Straight flight after turn - for LIDARs, it is crucial to have at least X meters of straight flight after each turn before entering the next segment. Default: 10 meters.
No actions at the last point - do not trigger the camera after the last point of the segment.
IMU Calibration
The calibration pattern is a straight line 30 meters long that the aircraft fly two times with the maximum horizontal speed (defined in the corresponding vehicle profile) without changing the gimbal or aircraft heading. The line follows the original surveying path to make flight safe and is highlighted with blue color.
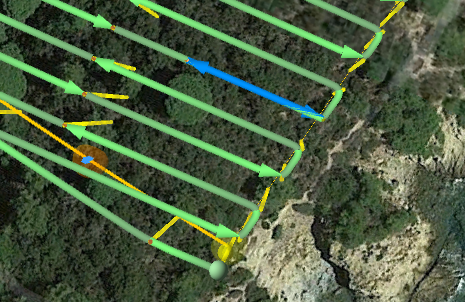
LiDAR IMU calibration segments indicated with blue color
In the properties file by default stated 100 seconds or 1000 meters. This configuration can be changed.
C:\Program Files (x86)\UgCS\server\ucs
ucs.properties
# The interval between LiDAR IMU calibrations during route execution.
# Depending on what is elapsed first.
ucs.lidar.calibration.interval.time=100
ucs.lidar.calibration.interval.distance=1000
Updated about 2 months ago