Photogrammetry corridor

Photogrammetry corridor flight plan
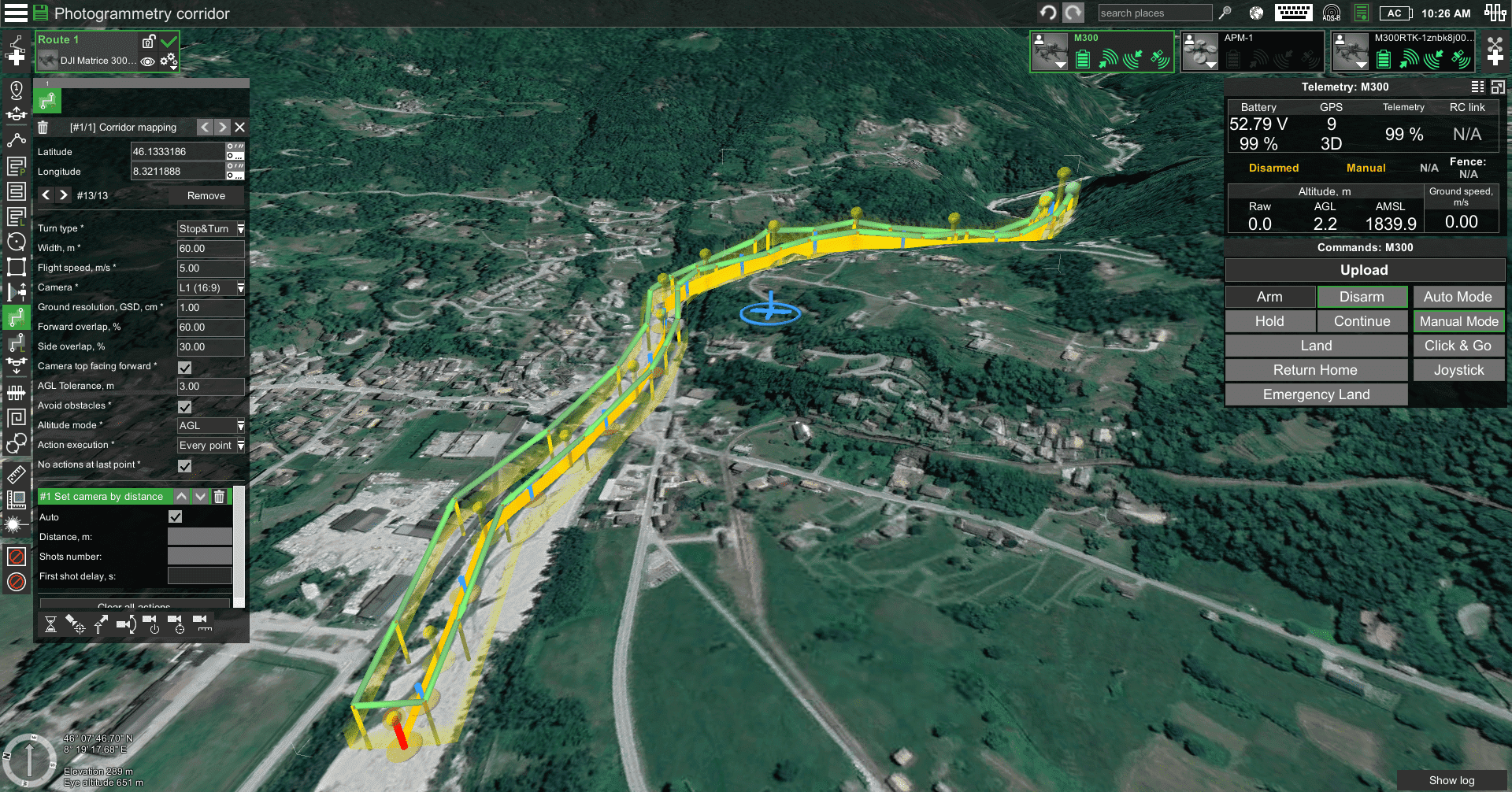
Photogrammetry corridor or corridor mapping tool is intended to support liner object inspection, like power lines, roads, and rivers. On such missions, drones can be equipped with photos or video-camera. It covers a specified corridor with a sensor footprint with a certain overlap (both forward and side). Altitude is calculated automatically depending on the specified GSD. A corridor is defined by specifying the following parameters:
Turn type - can be following:
- STOP_AND_TURN;
- BANK_TURN;
- STRAIGHT;
- SPLINE.
When changing the vehicle, the selected parameter remains
unchanged if supported by the new vehicle.
Width - corridor width in meters. This means adding a Width/2 margin to the
left and right from the center line. Integer entered in the inspector. By default, 30 or previously
entered values.
Speed along the path. Default is the value from the vehicle profile or previously entered value.
Camera - drop-down list with cameras attached to the vehicle profile. The default is 1st camera in the profile or a previously selected value.
GSD - Ground sample distance. The default is 2cm or the previously entered value.
Forward overlap - the percentage of forwarding overlap. The default is 30% or the previously entered value.
Side overlap - the percentage of side overlap. The default is 30% or the previously entered value.
Camera top facing forward – concerns the camera orientation to the motion vector. The flag assumes the camera is oriented so that the frames overlap over the upper frame boundary motion vector. If the flag is removed, the frames overlap along the lateral frame boundary.
AGL Tolerance - Allowable height difference, when it’s impossible to put additional waypoints. An additional point is placed if it goes beyond this boundary. If not set should be treated as 0 (zero).
Avoid obstacles.
Altitude mode - AMSL, AGL, Smart AGL, or Rangefinder. The default is AGL or a previously entered value.
Action execution - hows when actions are to be performed:
- ONLY_AT_START - only at the starting point;
- ACTIONS_EVERY_POINT - at each point;
- ACTIONS_ON_FORWARD_PASSES - at each point of passes.
But when turning, the camera should turn off.
No actions at last point - Do not perform actions at the last point.
The tool supports the same list of actions as the photogrammetry tool. The default action is camera attitude, the camera facing down and automatically triggered by distance. Automatic action parameters are being calculated the same way as for the photogrammetry tool.
Route calculator may generate several passes if it is required to fulfill coverage and overlap constraints. The following rules should be applied:
- passes are always parallel to the corridor center line
- if the corridor can be covered by a single pass then one pass coinciding center line is enough
- if one pass is not enough, the calculator will try to cover the corridor with a minimum possible number of passes balancing a number of passes on the left and right sides from the centerline
- It always keeps the drone trajectory inside the corridor
Obstacle avoidance behavior is the same as in the photogrammetry tool.
Altitude calculation from GSD is the same as for the photogrammetry tool.

Photogrammetry corridor split
It is available a new option to split the corridor.
To split the corridor choose the waypoint, where will end the first part, click the mouse right button, and choose "Split".

The corridor will be split into 2 new routes with the same parameters.


Updated 6 months ago