Route
The route is a calculated flight path based on the selected drone and payload profiles, selected parameters in each toolset, and camera actions. The route can consist of one or multiple segments.
When the route list gets expanded, all routes are sorted alphabetically.
Route parameters
The parameters are available from the route parameters button:

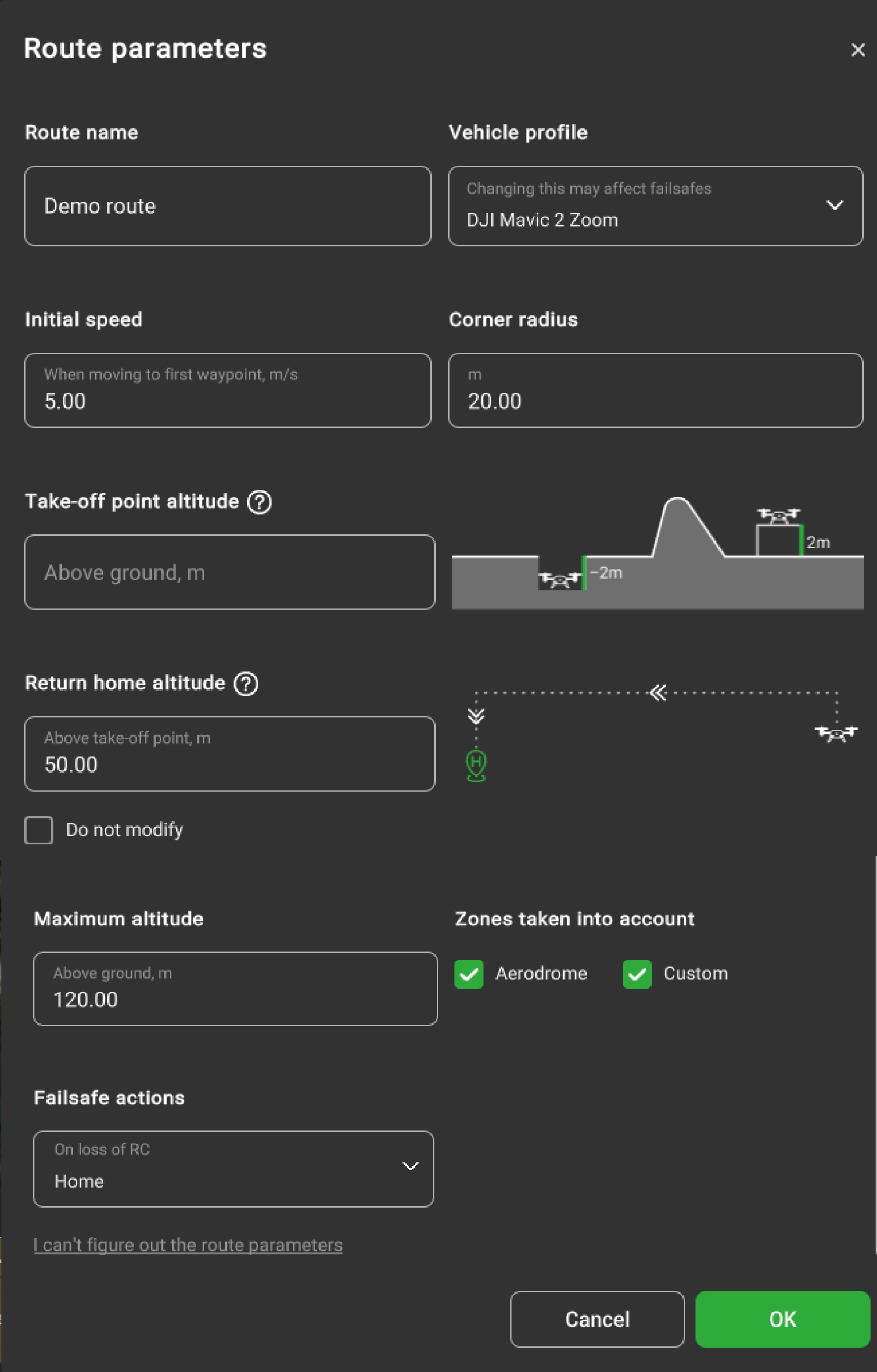
Take-off point altitude above ground, m – is the drone's real altitude relative to the ground. If the drone is placed on an object above the ground level or in the pit below the ground level not represented in elevation data. Take-off point altitude is a vital parameter for route calculation. It must be used when a vehicle takes off from a surface that is higher or lower than the ground (for example, a podium or a building roof). Another case when "Takeoff altitude" must be used is when the elevation data is incorrect. For example, if inspecting the career (or mound) that doesn't exist in the elevation model. If the career (or mound) doesn't exist in the elevation data, the below message will appear:

This message only appears when the drone is in RTK_FIX mode.
Note: it is highly recommended always to check altitude values. Altitude drift problems cannot be solved by software only and require operator attention. Always check whether the altitude is reported correctly after power cycling a vehicle or mission upload. UgCS tries to detect such conditions and warns, “It looks as if you have to power on/off your drone in order to reset barometer...” if the RAW altitude reported by the vehicle is very different from 0 at the time of mission upload.
Home location - is a point where the vehicle should return in the case of a failsafe condition. Triggered automatically or by the operator giving the command to return home. Failsafe execution conditions usually include emergencies such as loss of RC or low battery charge level.
Option “Do not modify” defines that autopilot actions for these settings remain default and not modified. The option is located in the drop-down list for each Failsafe action.
The home position is usually the point of initialization.
For ease of use, it is possible to view the home location of the vehicle by clicking on the “Focus on home location” command in the corresponding vehicle context.

Note: Every autopilot and thus vehicle might handle Home Location functionality differently. Please read the corresponding section in the vehicle’s VSM User guide for safe use.
Return home altitude, m (above take-off point) modifying this parameter will affect the manual and automatic return home function, the vehicle will go to a specified altitude when returning home.

Initial speed, m/s is the value from the drone profile by default, which sets up the speed from the home point to the route’s first point, the continuing point of the route (also if checked “Take-off to route’s first waypoint”). The user can override this value.
Corner radius, m is available for DJI drones only. It is the value from the drone profile by default, which controls the curvature of the path in case the route contains Adaptive Bank Turn waypoints. DJI drones limit the corner radius of a waypoint to 1/3 the length of the shortest adjacent segment. If the 'Corner radius' value is set higher, UgCS automatically reduces it to the maximum allowed value.
Maximum altitude above ground, m is the altitude limitation for the route. Note that maximum altitude will change type (above mean sea level or above ground) if the altitude type for the route will be changed (see below).
Action on GPS loss, action on RC loss, action on battery discharge, and datalink loss are the pre-defined emergency actions. In all cases, the option to wait or to land the vehicle can be chosen. Options to return to the home position and to continue the flight along the route are also available, provided GPS is operational.
Usually, it is only required to specify the home position and safe altitude; other parameters have reasonable default values based on known vehicle properties. Still, it should be ensured that defaults are correct. The software will perform checks and will cancel route creation if incorrectly defined or conflicting values of parameters are present. Notifications about errors in values will display at the bottom of the window, and the particular parameter is highlighted.
Add or edit common actions for multiple segments
While holding CTRL (cmd for macOS) select multiple segments to add or edit common actions. To select all segments, click CTRL+A for Windows or cmd+A for macOS.
When selecting multiple segments these functions will be available:
- add new action;
- delete action.
Note: Actions can be added/edited for segments if actions are in the same order and have the same value
Invert segment order
Allows changing the direction of the flight to the opposite course i.e. invert.
Convert to waypoints
Allows converting Photogrammetry or Area scan to the route of waypoints.
Split
Splits the initial route into two or more parts.
There are several options to split a route:
- Manually - split a route at the specific segment(s). In order to split into more than two parts, enter multiple segment numbers separated by a comma. The defined segment number will be the last segment of the first route part.
- Split by distance - split routes at a specific distance which is defined in the Distance field.
- Tolerance - if the existing waypoint is within the tolerance range of the split position, the existing waypoint will be used. Otherwise, a new waypoint will be created.
- Limit - define the allowed number of parts into which the route should split.
Overshoot defines the section added before each split part except the first one.
Merge
Allows uniting two separate routes into one.

Updated about 2 months ago