Drone profiles
In the Main menu section Profiles are listed all the base and custom vehicle profiles of UgCS.
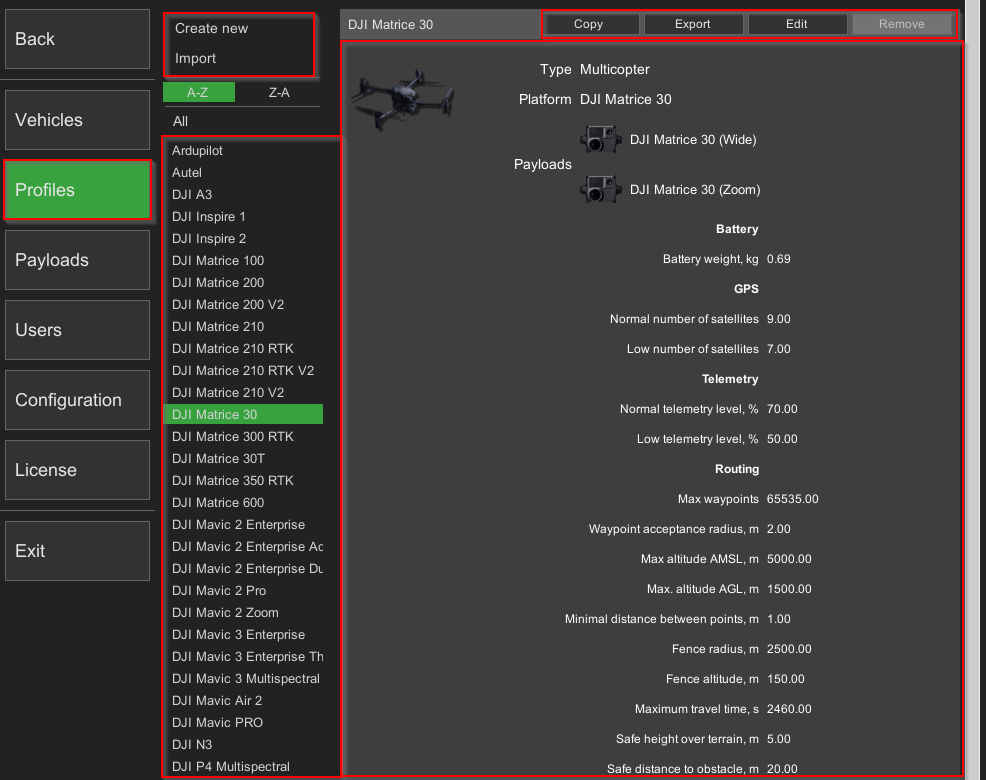
In the left column is a list of all vehicle profiles and the button to 'Create new' profile from scratch or Import from file. On the right, all vehicle profile block cards are listed.
Vehicle profiles parameters
| Parameter | Description | Mandatory |
|---|---|---|
| Main section | Yes | |
| Vehicle profile name | User-defined vehicle profile name | Yes |
| Type | Vehicle type (helicopter, multicopter, fixed-wing) | Yes |
| Platform | Choose a vehicle platform from the available variables | Yes |
| Payloads | Edit available payloads for the vehicle profile | Yes |
| Battery section | ||
| Charged battery voltage | Battery fully charged at voltage, V, shown as 100%. The voltage value shown in white color if between this voltage and normal voltage. (Not for DJI drones) | Yes |
| Normal battery voltage | Normal battery voltage V. Voltage value shown in white if at or above this voltage, shown in yellow if below this voltage. (Not for DJI drones) | Yes |
| Low battery voltage | Low, but sufficient voltage, V. Voltage value shown in yellow if at this voltage or between low and normal voltage. The voltage value shown in red if below this voltage. (Not for DJI drones) | Yes |
| Discharged battery voltage | Battery zero level, V, is shown as 0%. Shown in red. (Not for DJI drones) | Yes |
| Normal battery power level*, % | Normal battery level, percentage. Value in percent is shown in yellow if below this value. | No |
| Low battery power level**, % | Low battery level, percentage. Value in percent is shown in red if below this value. | No |
| Battery weight | Battery weight, kg | Yes |
| GPS section | ||
| Normal number of GPS satellites | The normal number of satellites provides a good level of accuracy. Shown in white color if at or above this level. The number of satellites shown in yellow color if below this level and between normal and low levels. | Yes |
| Low number of GPS satellites | The low number of GPS satellites while still being enough to launch the vehicle. The number of satellites shown in yellow color if at this level or between this and the normal level. The number of satellites shown in red color if below this level. | Yes |
| Telemetry section | ||
| Normal telemetry level | Normal telemetry level. The telemetry level value is shown in white color if at or above this level. The telemetry level value is shown in yellow color if below this level and between normal and low levels. | Yes |
| Low telemetry level | Low telemetry level. Telemetry level value is shown in yellow color if at this level or between this and normal level. Telemetry level value is shown in red color if below this level. | Yes |
| Routing section | ||
| Max. waypoints | Maximum supported WPs by the flight controller | Yes |
| Waypoint acceptance radius | 3D distance of the vehicle from the approach waypoint is sufficient to consider the point as reached. Please refer to autopilot documentation to check the applicability of this parameter. | Yes |
| Max altitude AMSL | Maximum allowed altitude AMSL, m | Yes |
| Max altitude AGL | Maximum allowed altitude AGL, m | Yes |
| Maximum Rangefinder distance, m | The maximum altitude, the rangefinder can be used from. See the rangefinder’s manual to set this parameter correctly. | Yes |
| Fence radius | Radio link range radius, m | Yes |
| Maximum travel time | Maximum flight time in seconds | Yes |
| Safe height over terrain | Minimal allowed distance to terrain for the vehicle, m. Small vehicles can fly very close to terrain but larger ones should fly higher | Yes |
| Safe distance to obstacle | Minimal allowed distance to obstacles for the vehicle, m | Yes |
| Max. climb rate | Maximum climb speed of copters for take-off waypoints, m/s | Yes |
| Max. descent rate | Maximum descent rate of copters for landing waypoints, m/s | Yes |
| Max. horizontal speed | Maximum horizontal speed, m/s | Yes |
| Default climb rate | Default climb speed of copters for take-off waypoints, m/s | Yes |
| Default descent rate | Default descent rate of copters for landing waypoints, m/s | Yes |
| Default horizontal speed | Default horizontal speed relative to the ground, m/s Used as default speed for route segments and for Click & Go mode. | Yes |
| Initial speed | Default speed from the home point to the route's first point, the continuing point of the route (also if checked "Take-off to route's first waypoint", m/s By default - 5m/s | Yes |
| Maximum wait time | For DJI drones wait action is now limited to 25.5 seconds according to DJI recommendations. | Yes |
| Corner radius | Controls the curvature of the path in case the route contains Adaptive Bank Turn waypoints. By default - 20m | Yes |
| Fixed-wing section*** | ||
| Glide slope, % | Default glide slope, % Applicable for the planes | Yes |
| Airspeed during landing approach | Airspeed for fixed-wing aircraft when approaching landing | No |
| Landing ground speed, m/s | Plane ground speed in the last flight segment to the landing point, m/s Applicable for planes and not used for multirotor | Yes |
| Landing flare altitude | Altitude in meters at which Landing Flare will be engaged, this parameter is secondary to the landing flare time parameter | No |
| Landing flare time | Time in which fixed-wing aircraft should reach the ground during landing when landing flare will be engaged, motors stopped, and heading locked | No |
| Minimum landing pitch | Minimum pitch in ° during final landing stage (after flare), the algorithm will control pitch above this value to achieve proper sink rate | No |
| Controller sink rate to pitch gain during flare | Sink rate gain for pitch demand during final landing stage, m/° | No |
| Weighting applied to speed control during landing | A value closer to 2 will result in the plane ignoring height error during landing (will keep the nose up), and a value closer to 0 results in the plane ignoring speed error (use with caution, could result in plane stall) | No |
| Maximum pitch in auto flight | Controls maximum pitch in ° during the automatic mode, Rage: 0 to 45°, if set to zero, Maximum pitch parameters will be used | No |
| Maximum pitch | The maximum commanded pitch-up angle, Range: 0 to 90° | No |
| Minimum throttle | Minimum throttle setting in % which Autopilot will apply. For the final landing stage, this is ignored | No |
| Landing sink rate (final stage) | The sink rate in meters/second for the final landing stage. Range: 0.0 to 2.0 | No |
| Enable rangefinder for landing | Enables the use of a rangefinder for automatic landing. The rangefinder will be used both on the landing approach and for the final flare | No |
| Minimum rangefinder distance | The minimum distance in centimeters that the rangefinder can reliably read | No |
| Basic section**** | ||
| Height**** | Vehicle height, m | Yes |
| Width**** | Vehicle width, m | Yes |
| Length**** | Vehicle length, m | Yes |
| Wind resistance**** | Maximum allowed wind speed, m/s | Yes |
| Dry take-off weight**** | Dry take-off weight, kg | Yes |
| Maximum take-off weight**** | Maximum allowed weight, kg | Yes |
*Percentage displayed if supported by the vehicle. If the vehicle does not report the remaining charge as a percentage, the UgCS calculates the percentage based on the voltage values from the vehicle profile.
**Percentage displayed if supported by the vehicle. If the vehicle does not report the remaining charge as a percentage, the UgCS calculates the percentage based on the voltage values from the vehicle profile.
***Display section depends on the type of vehicle.
****Currently ignored and reserved for future versions.
Adding a New Vehicle Profile
Add a new vehicle profile by creating a new card and filling in the parameters.
Importing/Exporting a Vehicle Profile
The import/export feature allows for the easy addition of a drone profile to UgCS, which is not included in default settings. This can be utilized by both drone manufacturers and UgCS-acquired custom drones.
Drone profile parameters in UgCS consider factors such as maximum speed. flight time, and more. Having the correct parameters for flight planning is critical to ensure flight safety.
Copying a Vehicle Profile
Copy an existing vehicle profile by selecting the profile and clicking on the 'Copy' button. It will create a duplicate of the selected profile with a '- Copy' suffix. Works the same as 'Edit' (see above), except it will save a new copy upon confirmation.
Editing a Vehicle Profile
Edit a vehicle profile by clicking on the profile card and pressing the “Edit” button. There are a variety of different (3D) avatars for vehicles. Vehicle profile parameters can be edited here as well.
Note: Profile changing leads to a route convert procedure that can cause errors in some cases. If this occurs, a message as a notification will be displayed to choose to accept or cancel the changes.
Deleting a Vehicle Profile
To remove the vehicle profile, select the profile and click 'Remove'.
Basic profiles can not be deleted. Basic profiles - are system profiles embedded into software installation.
Updated 5 months ago