Waypoint turn types
UgCS desktop route planning allows specifying different turn types – i.e. the way the drone passes the waypoint.
There are 2 different route planning modes for DJI autopilots: fixed-point turn mode (Stop and Turn) and adaptive coordinated turn mode (Adaptive Bank Turn); 2 different turn types for Ardupilot vehicles: Straight waypoint and Spline waypoint and 1 turn type for PX4 autopilot - straight.
| Turn type | Supported autopilot | Description | Notes |
|---|---|---|---|
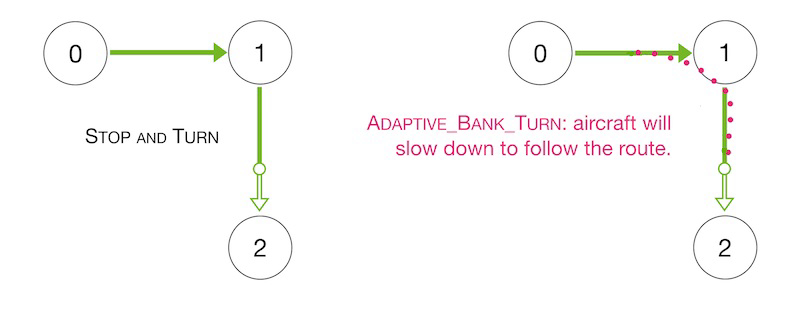
| Stop & Turn | DJI Autopilot | Aircraft flies to the first fixed point accurately stop at the fixed point and then flies to the next fixed point. | Works with all actions |
| Adaptive Bank Turn | DJI Autopilot | Aircraft will not stop at the fixed point, but will “cut the corner” and pass through without a stop. The maximum corner radius can be adjusted in UgCS for DJI mobile applications in “drone-specific settings”. | Doesn't work with Wait, Change yaw, Set camera altitude (except DJI M300), Set camera mode (except DJI M300), and Panorama actions. |
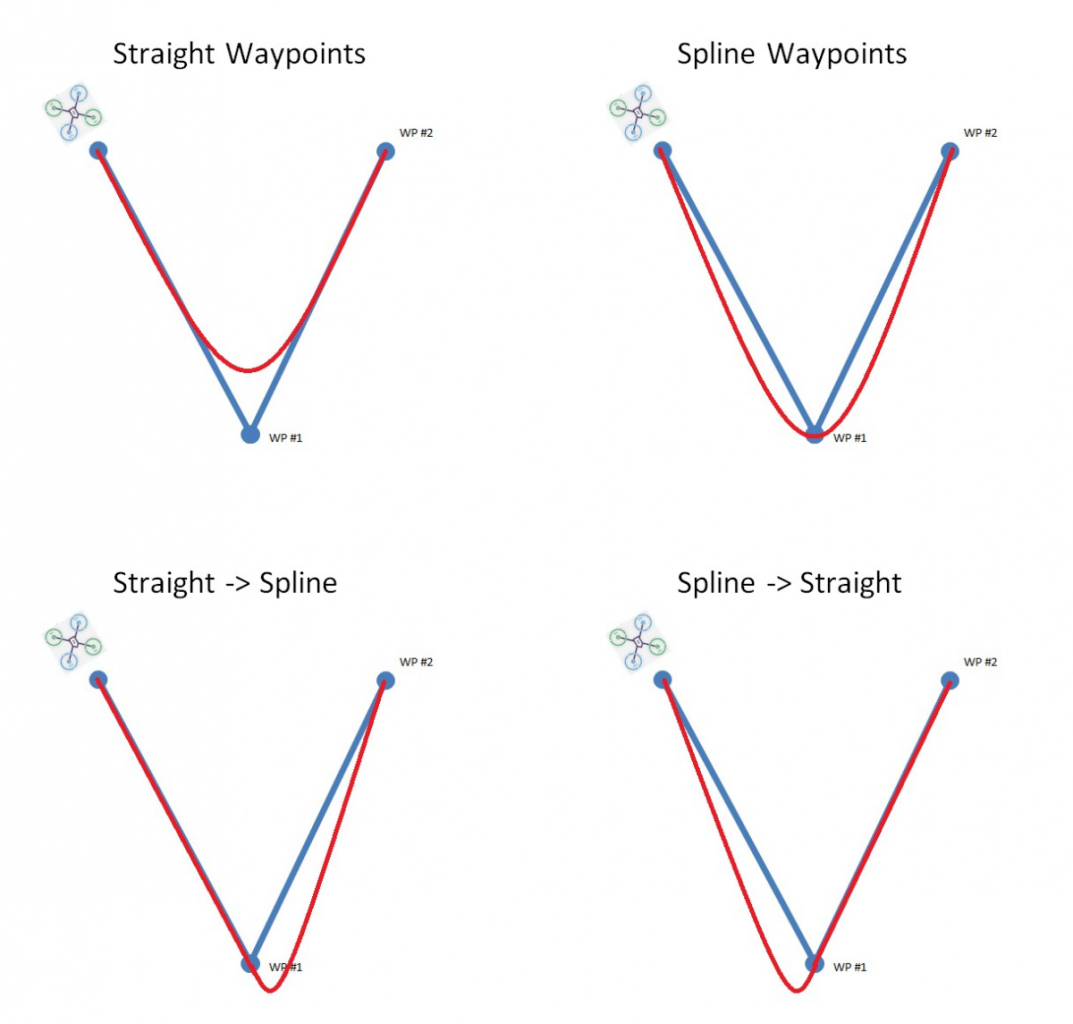
| Straight | Ardupilot, PX4 | The vehicle will fly straight to the location specified as a lat, lon, and altitude. | |
| Spline | Ardupilot | The vehicle will fly to the location specified as a lat, lon, and altitude, but when executed the vehicle will fly smooth paths (both vertically and horizontally) instead of straight lines | Make sure the line segment after the waypoint is long enough otherwise autopilot can fly unexpectedly missing some waypoints. What is "long enough"? The desired segment length varies with speed. Our tests show that with a ground speed of 5m/s route segment must be at least 20m long. If the speed is set to 10m/s then the route segment after the waypoint should be at least 50 meters. |
!!! Different turn types for fixed-wing vehicles are not supported.
Updated about 2 months ago